技术发展迅速,飞控系统依托多技术助力,不断实现技术升级。在此发展过程中,飞控软件的设计变得尤为关键,并且日益复杂。下面,我将具体介绍飞控系统软件的相关知识。
飞控系统发展驱动
飞控系统不断进步,这多亏了多项技术的提高。卫星功能变得更强大,定位也更为精准;计算机处理能力和算法的改进,让数据处理变得更加迅速高效;实时系统的运用、机电飞控系统的优化以及导航技术的进步,这些因素共同推动了飞控系统随着软件架构的更新而发展,它们在现代航空领域发挥着极其重要的作用。
技术进步让飞行控制系统变得更稳更智能。以前,许多飞行任务因为复杂而难以实现,但现在,得益于技术发展,这些任务变得可操作。例如,以前只能进行简单飞行的无人机,现在能执行测绘、物流配送等复杂任务,大大扩展了其应用范围。
飞控软件设计职责
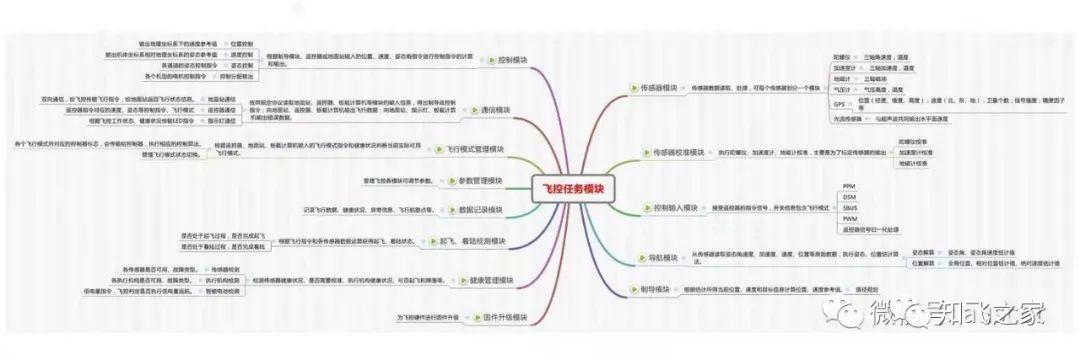
飞控软件的设计重点在于建立一个合理的流程。设计者必须保证飞控系统中的各个功能模块能够顺畅且高效地工作。以无人机飞控系统为例,必须保证导航、控制和通信等模块能够相互配合,各自履行职责的同时,也要相互协作。
各模块必须紧密配合,这样才能让飞控系统发挥出出色的性能。一旦某个模块出了问题,整个系统可能会完全失效。这就像团队协作一样,每个成员都有自己的任务,只有大家齐心协力,才能实现目标。飞控软件的设计理念,就是要保证这些“成员”之间能够默契地合作。
现代无人机飞控软件需求
开发这款新型无人机飞行控制系统的软件,其目标不只是让飞机飞起来,还涵盖了众多其他标准。软件的各个部分,除了具备基本功能,还需具备额外的扩展能力,以适应各种不同的使用场景。比如,针对农业用途的无人机,就需要配备专门的模块,比如农药喷洒控制系统。
无人机在各行各业中广泛应用,这使得其软件模块必须拥有出色的扩展能力。比如在物流配送这一领域,就需要增加与货物识别和投放等功能相匹配的模块,这样才能更高效地执行任务。
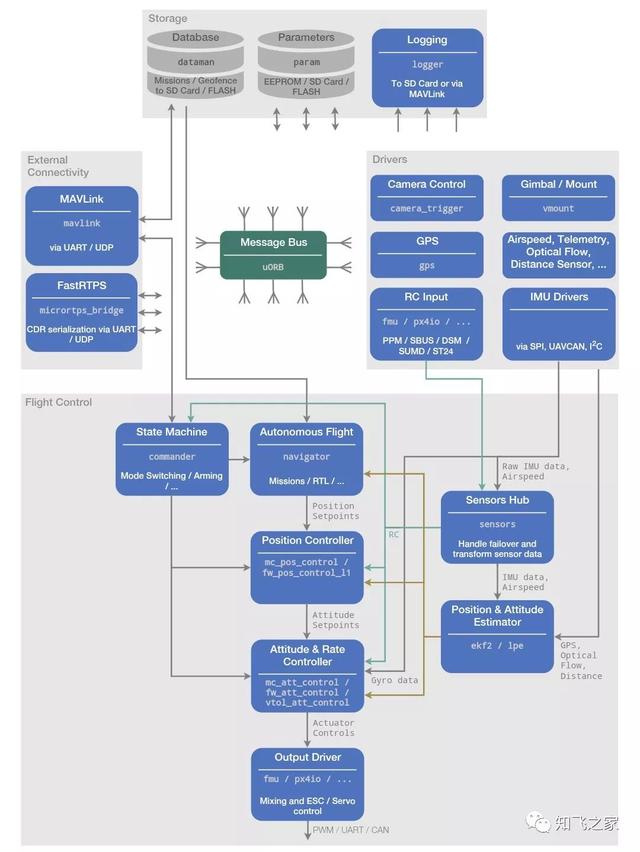
带OS飞控的特点和实现
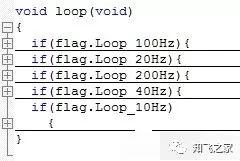
飞控系统具备OS功能,特点鲜明。RTOS将应用软件分割成多个任务,既简化了软件设计,又保证了飞行控制的实时性。系统还包含了一系列工具、驱动或模块和外围软件接口。所有软件与OS内核一起编译成固件,然后上传到飞控板,完成软件的配置。
简言之,相较于传统飞控,搭载操作系统的飞控就好比拥有了一位智能管家。它能高效地调度任务,使系统运行更高效、更稳定。以大疆的无人机为例,其先进的飞控系统采用操作系统设计,飞行体验更上一层楼,还能执行更多复杂动作。
带OS飞控系统软件架构特性
飞控系统软件中的OS模块,最引人注目的是其抽象和多态的特性。为了使飞控算法代码能够反复利用,它实现了飞控逻辑与底层控制器指令的分离。因此,在更换底层控制器时,飞控逻辑部分仍能保持稳定,无需进行修改。
这种特性使得飞控系统的研发和更新变得简便高效。在更新时,开发者不必重新编写大量代码,这大大降低了时间和金钱的投入,推动了飞控技术的飞速进步。
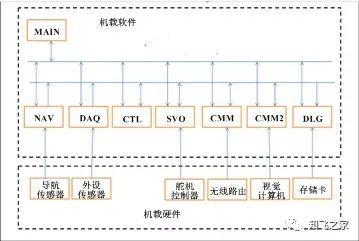
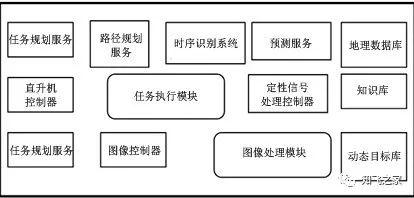
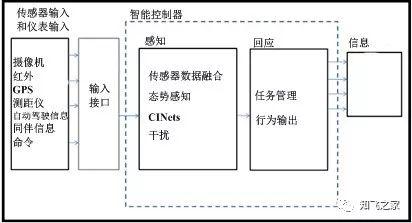
不同软件架构设计及特点
OCP是一种面向对象的软件基础构件,它让控制设计师能够专注于控制设计。这个平台利用COBRA技术打造了即插即用的环境,并且基于以反应为核心的软件控制方法。智能架构以行为为基石,实行层级控制,功能复杂度从下到上逐步增加。回应模块依照感知模块生成的计划来完成任务。《无人旋翼系统》中提到的行为式架构适合用于无人机软件系统。飞行控制模块通过多线程框架完成多项任务。
不同的架构都有其适用的场景和优势。比如,在需要快速响应的情境下,以快速响应为核心理念的架构更为合适;而对于功能较为复杂的系统,层级式的架构则能更高效地完成任务的管理和分配。
读完这篇文章,您可能会思考,在未来的飞控系统软件领域,哪种架构模式会有更广阔的发展空间?欢迎您留下您的看法和留言。此外,也请您为这篇文章点个赞,并帮忙转发一下。