服务型室内机器人中,导航功能扮演着重要角色,这与其在室内的自主移动能力紧密相连。接下来,我们将详细阐述导航的几个核心要点。
导航重要性

机器人系统中包含多个部分,其中导航功能尤为关键。如今,随着服务型室内机器人的盛行,机器人若要在室内自由行动,就必须依靠精确的导航。这样,它们才能为我们带来便利,比如在酒店里,送物品的机器人能够借助导航准确找到客人的房间。
感知实现依赖
实现感知功能,各类传感器是不可或缺的。比如,激光雷达能扫描四周环境,测量物体距离,给机器人提供必要的环境数据;摄像头能捕捉图像,感知可视区域内的状况;RGB-D摄像头还能提供深度数据,增强机器人对环境的理解。众多传感器共同协作,确保机器人能更准确地感知周围世界。
地图生成与保存

SLAM技术常被用来制作地图,把机器人所处的环境转换成数字地图。这些地图需要被保存起来,以便以后使用。在ROS系统里,有专门的功能包负责这项工作。借助这个功能包,我们能够把费尽心思制作的地图安全地储存起来,这样在导航时就可以随时调用了。
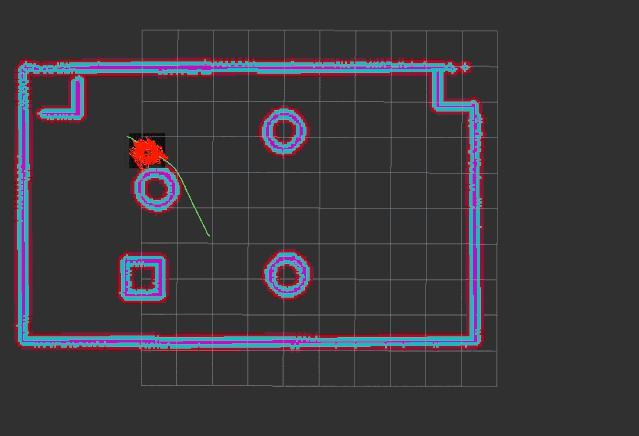
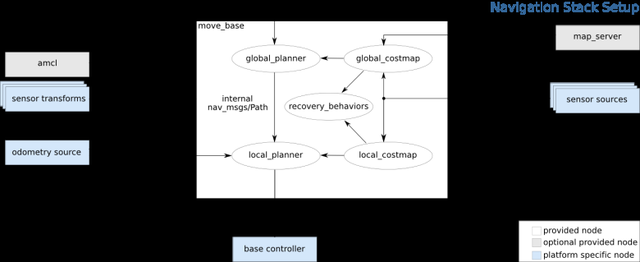
路径规划方式

机器人需要预先确定移动的路线,这个过程称为路径规划。在ROS系统中,有专门的功能包支持这一功能,主要由两个主要的规划器构成。借助这些功能包,机器人能够依据地图和自身所在的位置,计算出从起点到终点的最优路径。就好比在大型商场里,清洁机器人能够规划出一条合理的清洁路径。
导航消息发布
导航功能通过发布话题或Twist格式信息,这些信息以机器人的基座坐标系为基准,主要传递运动指令。机器人接收到指令后,会依据指令中的速度和方向数据来移动,比如指示机器人前进、后退或转向等具体动作。
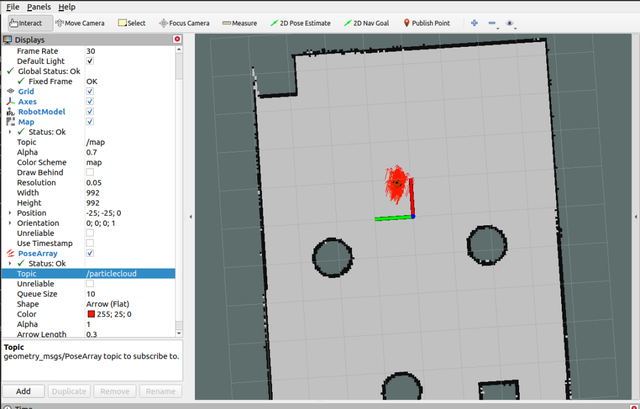
仿真环境实现
在模拟环境中,机器人能够顺利获取并传递相关数据,同时输出里程计数据及传感器信息。这说明,其导航模块里的运动控制与环境感知功能均已到位。因此,我们得以在模拟环境中对机器人的导航性能进行检测与调整,以便及时发现并解决潜在问题,确保机器人在虚拟世界中能够顺利进行预演。
日常生活中,你是否遇到过能够自主导航移动的机器人?对其表现有何看法?欢迎点赞、转发这篇文章,并在评论区展开讨论。